関連記事
まずは説明書
私は個人的には説明書を読むのは好きではないのですが、今回は慎重に作業を進めようと付属のCD-ROMをひらいてみました。
PVや今後のパーツ増設の解説も入っているようで、色々と項目が並んでいます。

作業しやすいように印刷しますか・・

予想外のボリュームでプリンターのインクもとどめをさされます・・・・
あまりにも多いのでファイリングしました・・・
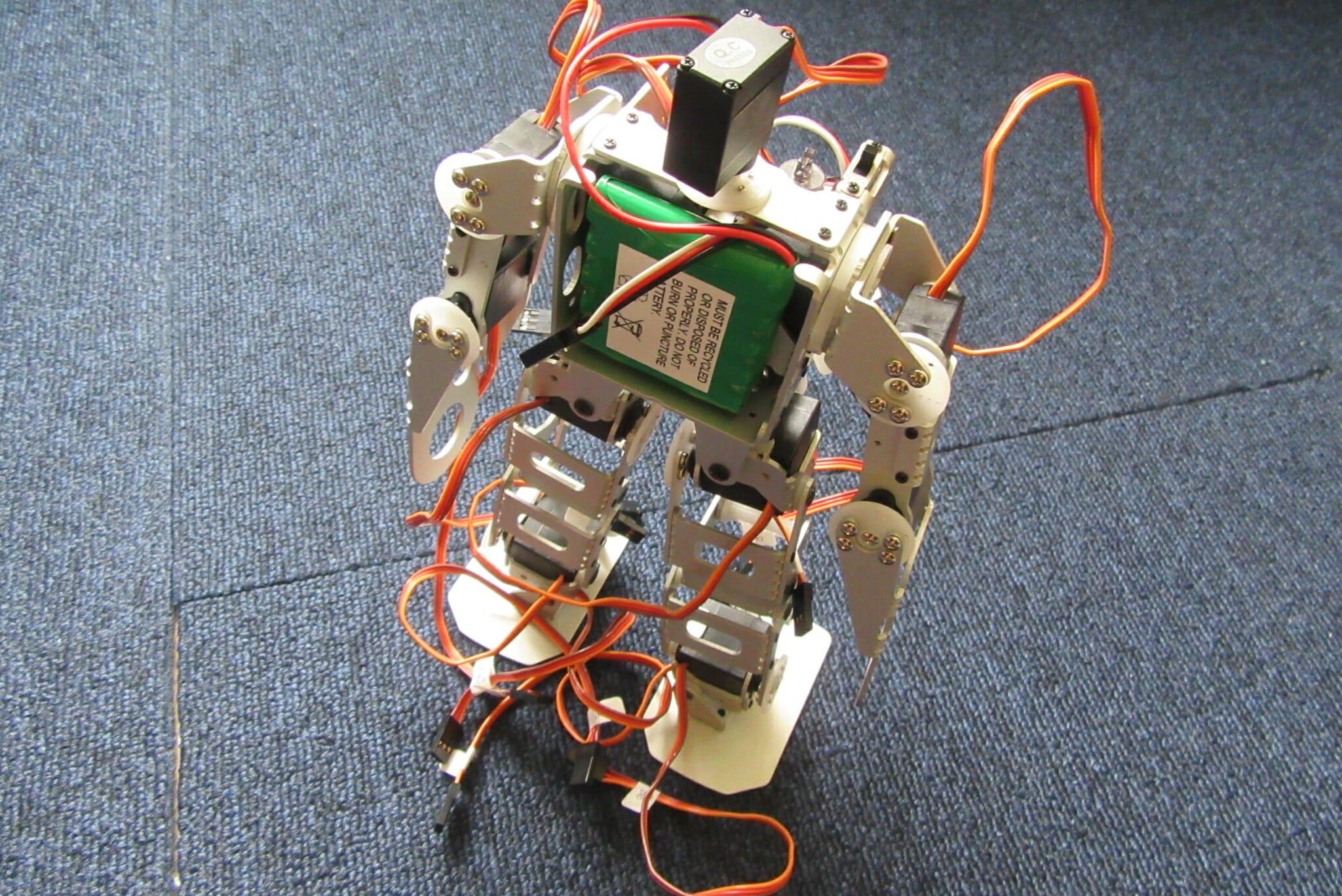
最初はサーボの原点出し
説明書にそって作業を進めるなら、最初はサーボの原点出しになるようです。

サーボには可動範囲があり、動き出しの開始地点(0地点)があります。
組み立て前のサーボは最初から0地点に固定されているとは限りません。
電源を入れるとサーボがジコッと動いて0地点になるのですが、
これを確認しないで組み立ててしまうと、
電源を入れたとたんロボの関節があらぬ方向を向いてしまい、
泣く泣く分解することになります・・・。
というわけで、組み立て前には
電池を用意しておくか、

バッテリーの充電をしておかないとなりませんね。


今回はバッテリーを使うこととします。
というわけで、まず充電したいと思います。
今回も組み立てが開始しない・・・
うう。すいません・・・・
追記
説明書を読み進めていくと、どうやら最初の原点出しは電池BOXを使ってやったほうがよいようです!!安全策はこちらでした!!
バッテリーを使用するなら
バッテリーとスイッチをつなぐケーブルを抜いておけば、電池と同じことですね・・・

コメント