関連記事
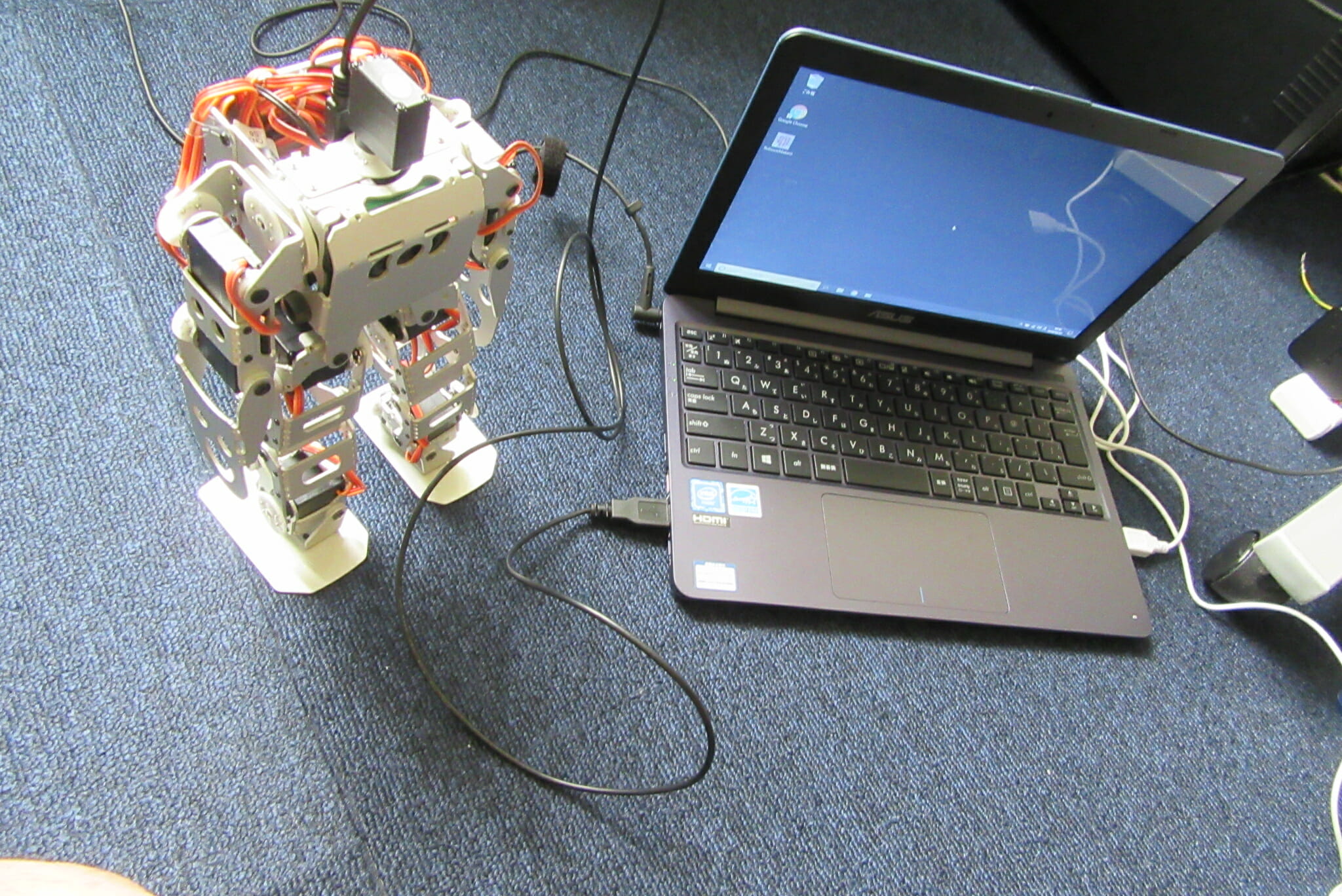
いよいよPCに接続してサーボの原点出しに挑戦
下準備を開始
部品分け



サーボの番号付け


ソフトウエアのインストール
CDROMからRobovieMaker2をインストールします。
セットアップexeから普通の手順で大丈夫でした。


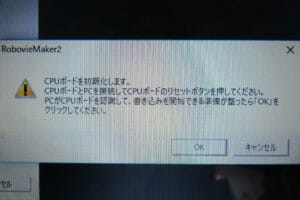
CPUボードの初期化
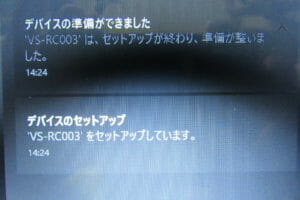
ケーブルでCPUボードをパソコンにつなげます。

パソコンが勝手にデバイスを認識します。
Roboviemaker2を起動します。
もう説明書の通りに事が運んでゆきます。
実はここからが少し??でした
説明書ではこの後CPUボードにサーボや電池ボックスを取り付けるのですが、

勘違いしてソフトを落としてしまう
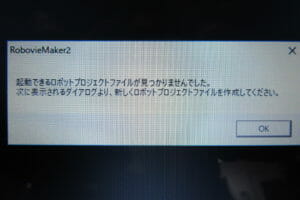
私はこの時、ソフトウエアRobovieMaker2を落として、CPUボードもパソコンから外して作業しました。
そして起動すると当然ながらファイルがありませんと画面に出る。
ただ、そのまま進めても大丈夫でした。
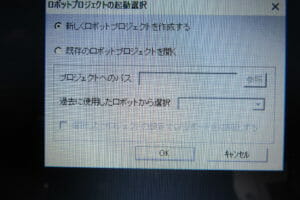
次の画面で「既存のロボットプロジェクトを使用する」で強引に進めてみます。
「プロジェクトファイルのパス」は参照で先ほど保存したファイルを選んで開きます。
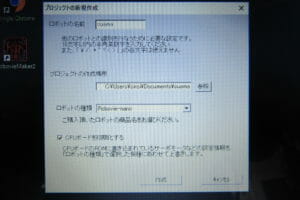
参照ファイルの中に自分のロボの名前のフォルダがあるのでそれを選択すると
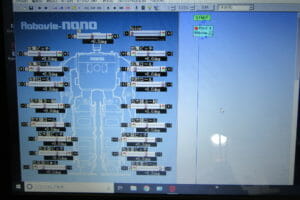
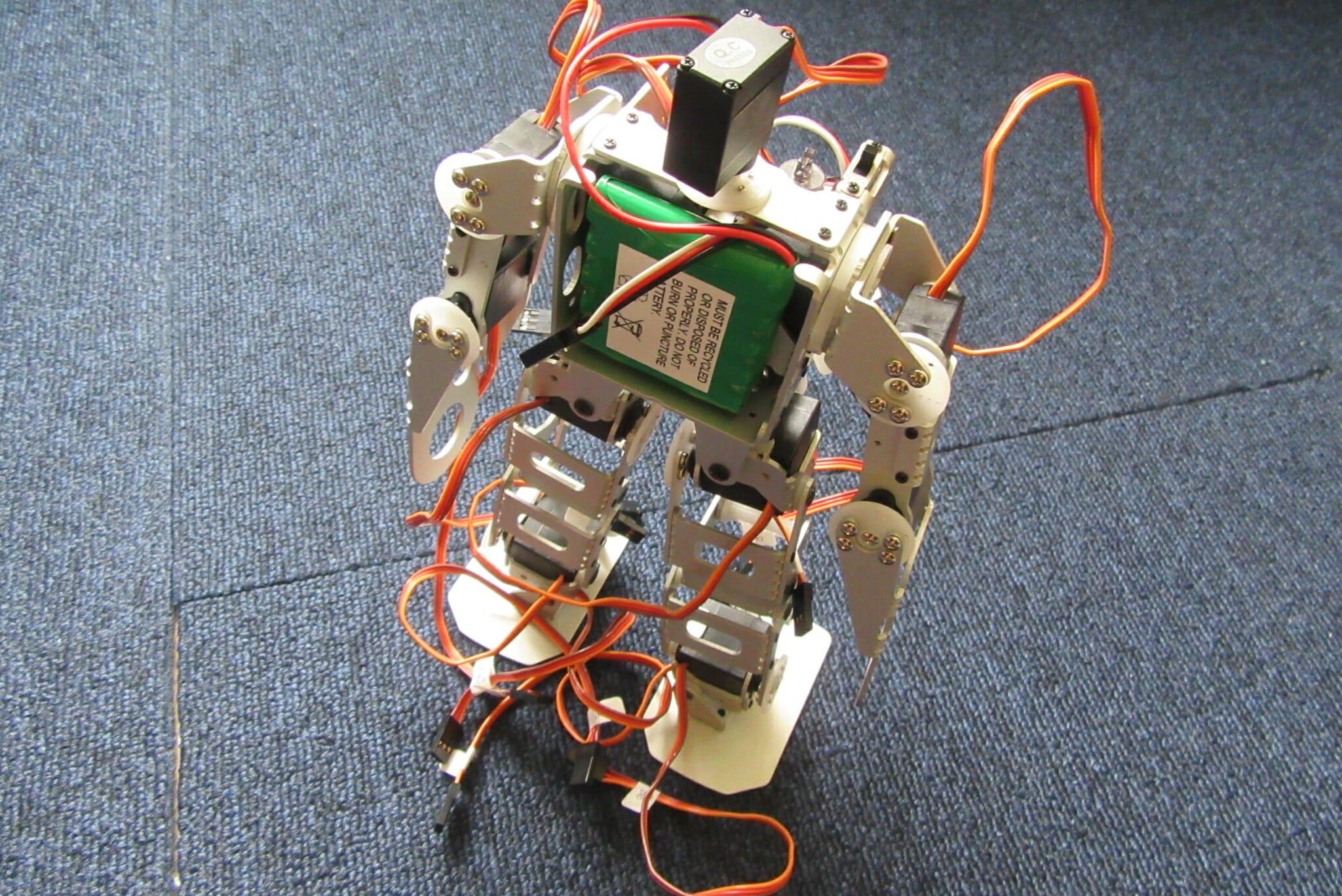
いよいよ本当にサーボの原点出し
手順については、本当に説明書の通りにやりました。
通信して、電池をいれて、電池ボックスのスイッチオン。
RobovieMaker2でサーボをオンにすると、
サーボがジコッ反応。原点は出せたようです。
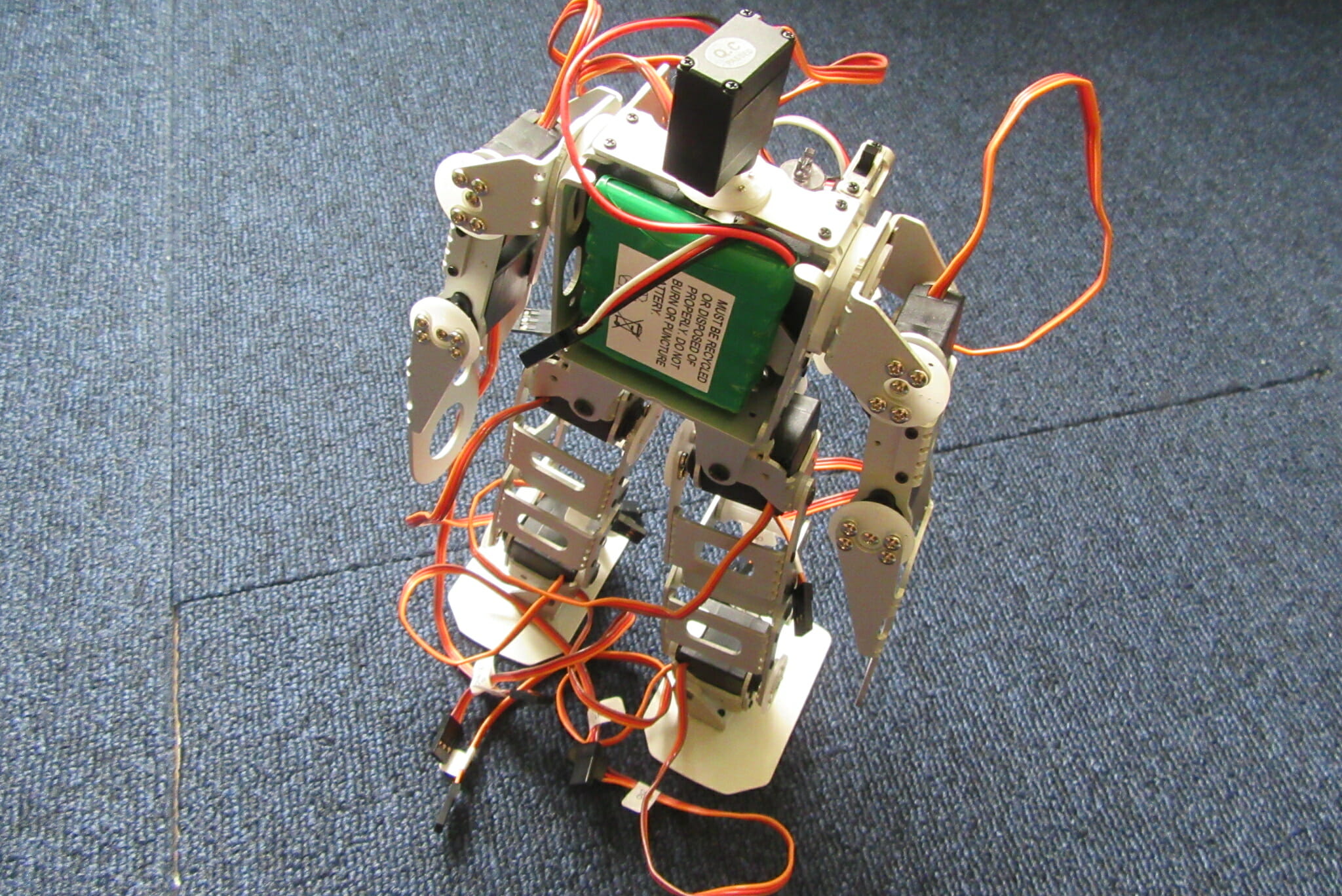
説明書によるとすべてを外す前に、「全部のサーボが動いているか確認して」
とありますが、「どうやって・・・?」
疑問が残るものの、まぁいいやと確認しないで全部分解しました( 一一)
とりあえず、次に進めてみたいと思います。
コメント