前回はサーボを動かすところまで
ボタンを押してサーボが回転するところまでやりました。
※ ちなみに、回転サーボはグルグル回る特殊なサーボですので、普通のサーボはこのやり方では走りませんよ!
今回は無線に挑戦です
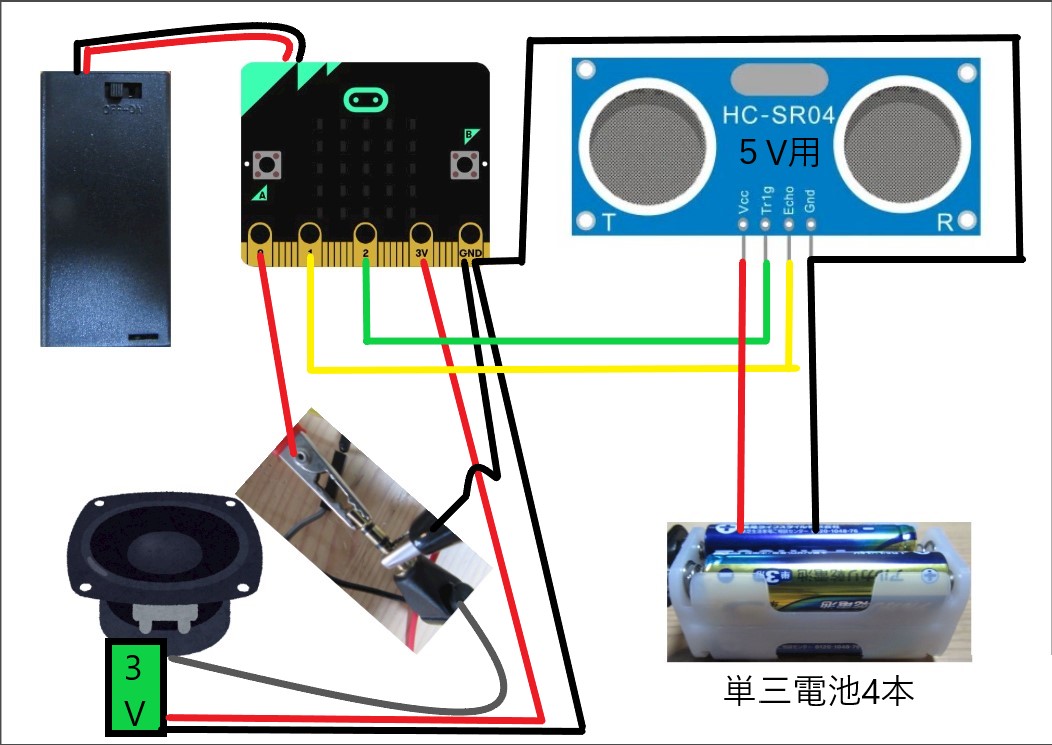
micro:bitには無線機能があります。
通信してLEDを光らせたり、じゃんけんゲームができたりします。
こ今回はこの機能を使ってリモコンカーに挑戦します。
ところで、今回私が試したら、どうゆうわけか2チャンネルしか使えませんでした。
そんなわけで「2チャンネル+何もしない」で構成しました。
秘密があるなら誰か教えてください!
送信側コード
最初に起動の合図としてLEDを点灯させます。

無線のグループ番号は、受信側と揃えます。
ボタンを押したときの動作
今回はAボタン、Bボタン、両方手を離した時で作りました。
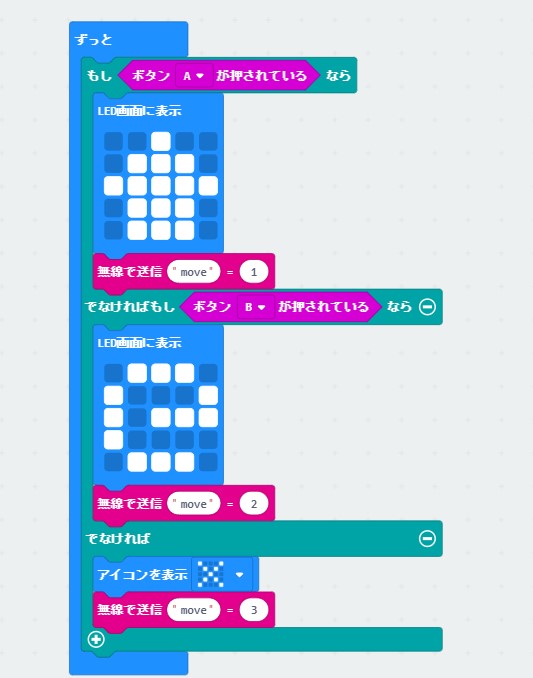
全体の枠として、「ずっと」です。
その中に「もし~だったら」といくわけです。
Aボタンが押されたら、直進アイコンです。
無線で送信”move”(名前はなんでもいい)=1です。
一の型起動!です。
「でなければ~」で、Bボタンを入れます。
一応回転アイコンです。
“move”=2です。
二の型起動!です。
「でなければ」は停止を指示します。
×アイコンです。
“move”=3です。
三の型・・・・もういいですね。
受信側のコード
最初はとりあえず基本の数値を入力しますが、たぶんサーボの個体差があるのでまっすぐ走りません。そのあたりは後で微調整します。
最初は状態のクリアをしたほうがいいみたいです。
2つの「偽にする」が、クリアするおまじない?みたいですよ!(笑)
そしてHELLO!のアイコンを選択しました。

無線のグループは送信側と合わせて、1ですね。
アクションの数値入力
基本として回転サーボは角度
- 90で中立
- 180で正転
- 30で逆転
になります。どっちが正転か逆転か勝手に決めていますけど・・・。
それをふまえていきます。
全体の大枠として、無線で受信したときname,valueを選びます。
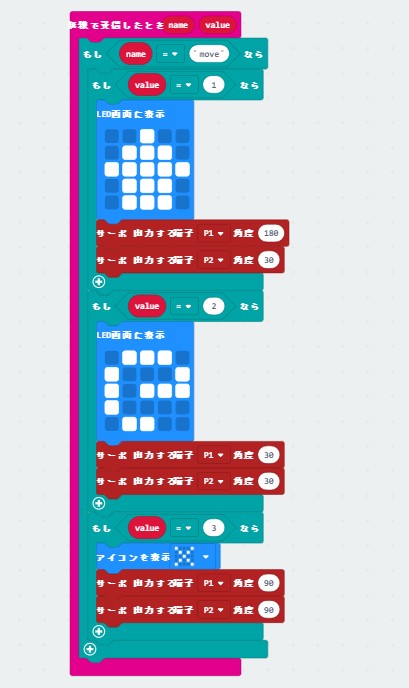
それで送信側で名付けた”move”を設定します。
「もし」名前が、moveならとやります。
その中にまた「もし」と作りまして、
一の型、二の型、三の型と設定します。
アイコンは送信と同じものを使用します。
1は直進
サーボにタイヤをつけて左右に配置すると、左右でサーボを裏返しにとりつけることになります。

サーボの出力は拡張基盤の指定で、P1とP2ですので、互いに逆回転でフル出力します。
角度180と30にします。
回転方向は実際に走らせてみるのが手っ取り早いでしょう。
2は旋回
P1、P2ともに角度30にします。
180にしたら逆回転ですね。
3は停止です
両方のボタンを離した時の動作です。
角度を90に設定します。
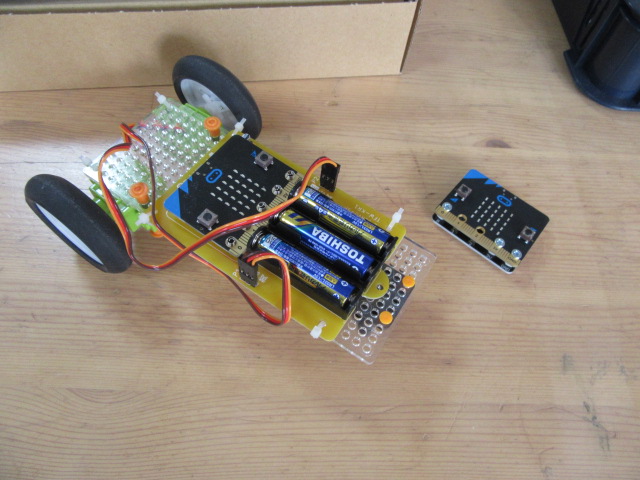
車両の作り方
全部その辺にあったもので作りました。
田宮の工作セットのものが多いです。
ユニバーサルプレート
ナロータイヤ

ボールキャスター

をプラスチックバンドで固定しました。
まずはサーボホーンにタイヤをねじ止めします。

そしてサーボをさして、ねじ止めします。

後は車体にしっかり固定するだけです。
サーボを前にしました。
後ろはボールキャスター1個だけ、三輪車です。
動かしてみました
無線の反応遅いです!
でも一応操作成功です。
直進時に曲がらないように調整しますが、私はこのくらいの調整でしたよ。

実際に走らせて、サーボの角度をかえてみるしかないです。
お粗末様でした。
次は距離センサーを試してみたいです。無線ではなく勝手に走ることに挑戦してみたいです。

コメント