マイコンボードのmicro:bitを使ってセンサーカーの実験などをしていましたが、
ついに3Dプリンタでボディを作ることができました。
大幅に部品点数も減らして小型化。
大型ハムスターくらいの大きさでしょうか?
構造も単純でとても簡単。に30分程度で組み立てられます。
工具もドライバーだけ。
まだ完成品ではありませんが、ご紹介します。
部品
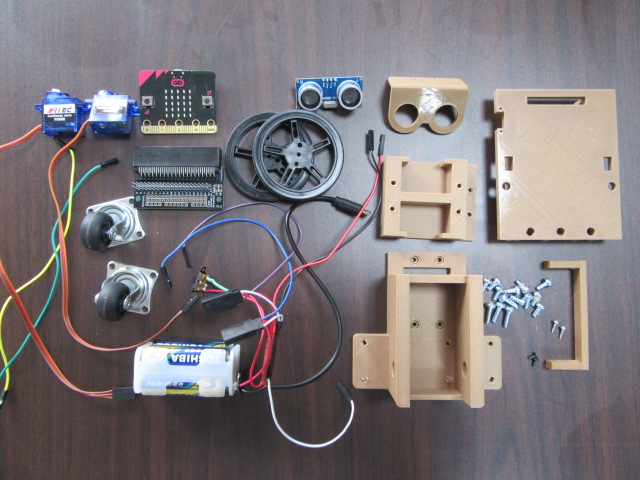
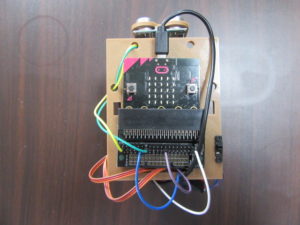
これが全部品です。

3Dプリンタの部品は5個です。

使用部品は
- micro:bit本体
- IOピンの拡張ボード
- タイヤ付き360度回転サーボ
- 電池ボックス
- キャスター
- ネジ、スイッチ、配線類
といったところでしょうか。
組み立て
最初に足まわりから。
一番下のボディーにサーボをはめ込みます。ネジなしです。
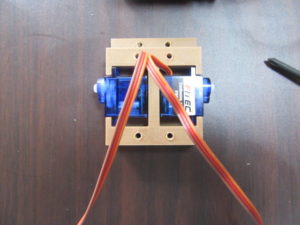
真ん中のボディーにサーボの線を通して、M4のタッピングビスでボディを連結します。
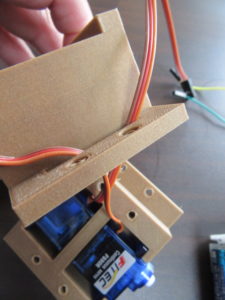

後ろ足、キャスターを取り付けます。少し短いネジです。8mm

前足、タイヤをサーボに刺してネジで固定です。


超音波距離センサーHC-SRO4を取り付けますが、少し加工をします。
取付ピンを上向きにするだけなんですが・・・。

センサーに眼鏡をかけてもらい、ボディーに固定します。


ボディーに穴が開いているのは、配線をまとめるためです。

こんな感じにまとめるといいかもしれません。

電池ボックスをおなかに入れて、線をつないでいきます。

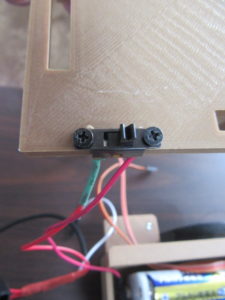
スイッチを先に取り付けます。
サーボの配線はこんな感じにまとめます。

micro:bitをIOピンと合体します。剣山みたいのが、あいおーぴんです。

天井に乗せて、すべて配線します。
今回の配線を書いておきますね。
距離センサー
- GND 電池のマイナス側、黒色の線。
- ECHO 黄色の線、bitの0番に接続。
- TRIG 緑色の線、bitの8番に接続。
- VCC 電池のプラス側、赤色の線。
サーボ
- GND 茶色~白色
- プラス 赤色~赤色
- 信号線 オレンジ色~青色(右)、紫色(左)
そしてすべてのGNDをひとまとめにして、bitの0番に接続。
電源はマイクロUSBを使って、プラスとマイナスだけ接続。
信号線はつなぎません。
マイクロUSBの配線はだいたい赤と黒がプラスマイナスかと思いますが、
違うのもあるかもしれません。
ウィキから画像借りちゃいます。
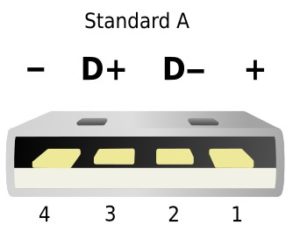
これはUSBですけどね。ご参考に。Dはデータね。
完成!

お店に来てくれたら配線とか、結線とか一緒にやりましょう!
プログラム
私は本職ではないので、こんなコードでいいのか知りませんが、一応貼っときます。
実力のほどを動画で!
短いんですけどね・・・。
今度なんか遊びを考えたいです!


コメント