
前回はmicro:bitではじめてサーボを動かしてみました。
今回は走るロボットを目指して、拡張基盤を使って回転サーボを動かしてみます。
何かと初めてなので、この記事を参考にしました。
ありがとうございました。
拡張基盤
拡張基盤とは?
micro:bitに別の基盤を合体させてできることを増やすためのものです。
今回使用したのは、TFabworksというメーカーのものです。
もう販売中止なのかな?これ。

単4電池3本で、micro:bitとサーボに給電できるます。
スピーカーつきとのことで、動きに合わせて音が出せるのかも。
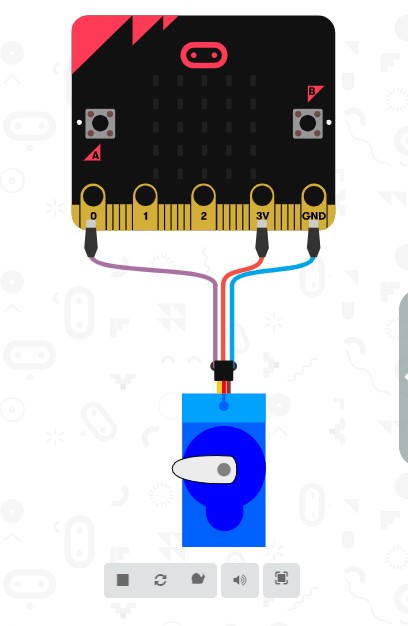
micro:bitは端子部分をあわせて、のせるようにセットします。
端子部分はバネみたいになっています。

サーボも専用端子にはめるだけ、色も書いてあります。

セットしてみるとこんな感じです。

コードを作ってみます
360度回転サーボは、角度が、
- 90で停止
- 0~89で正回転
- 91~180で逆回転
だそうです。その間の数値でスピードが決まるそうです。
どっちが正転かはサーボのつけ方によりますかね(笑)
まずは電源を入れたらアイコン表示
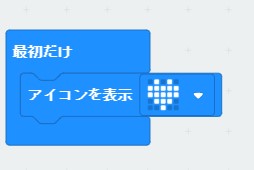
ハートマークにしました。
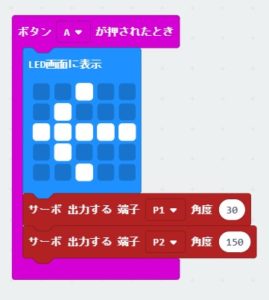
ボタンを押したときの動作
拡張基盤に指定された端子番号が、P1とP2なのでそれにあわせてコードを書きます。
Aボタンを押したとき
矢印アイコンがAを指して、サーボがおのおの逆回転するようにしました。
P1 = 30
P2 = 150
で入力しました。
Bボタンを押したとき
矢印アイコンがBを指して、Aボタンの時の裏返しに回転するようにしました。
P1 = 150
P2 = 30
です。

A + Bでボタンを押したとき停止するようにしました。
P1 = 90
P2 = 90
で入力です。

アイコンはすいません・・・残念な感じです。
動かしてみました
これでついに3Dプリンタでボディーを作る?
その前にmicro:bitを一つ無線にして操作する方法がある?様です。
また調べてみます。

コメント