今回はとりあえずサーボを動かしてみます。
サーボって?
モーターがジコジコ決められた角度に動くものです。
ラジコンとかロボの関節とかになります。

micro:bitやRaspberry-Piで使用するのはラジコンで使うものよりも、少し小さいマイクロサーボが多いです。
一般的なものは下写真のような感じです。

360度回転サーボ
先ほどサーボは決められた角度に動くと書きましたが、回転サーボはそうではなく、普通のモーターみたいにグルグル回転します。
?それじゃモーターじゃん?
そうなんですが、サーボの制御方法で扱えるのが利点でしょうか。
micro:bitで作る軽いロボなら別電源なしで、回転サーボで走らせたりするようです。
私も試したことがなかったので、試しに今回はこれを使ってみました。

なんとレゴにはめ込み対応らしいです。
ただ、メーカーはよくわかりません・・・。
同じ商品に見えるのに、違う名前が書いてあり、どれがメーカーかわかりません。
なにはともあれ試してみました。
micro:bitとの接続方法
普通のモーターはプラスとマイナスの線だけですが、サーボはもう一つ信号線があります。

黄色、信号線
赤色、プラス
茶色、マイナス
サーボによって線の色は多少違うかもしれませんが、並びは一緒です。
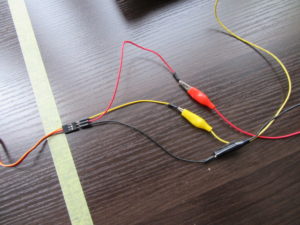
普通は専用の3本ピンにカポッとはめるだけなんですが、micro:bitにはコネクタがないので、ジャンパピンとワニ口クリップを使用します。


※ 専用の拡張基盤を使うとサーボのコネクタがありますよ!本気の作品にはそういったものを使ったほうがきれいですね。
話を戻します。
ジャンパピンとワニ口クリップをつないでいきますね、刺して挟んでです。
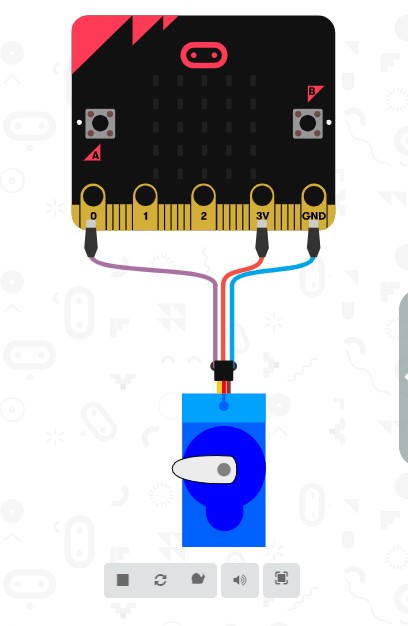
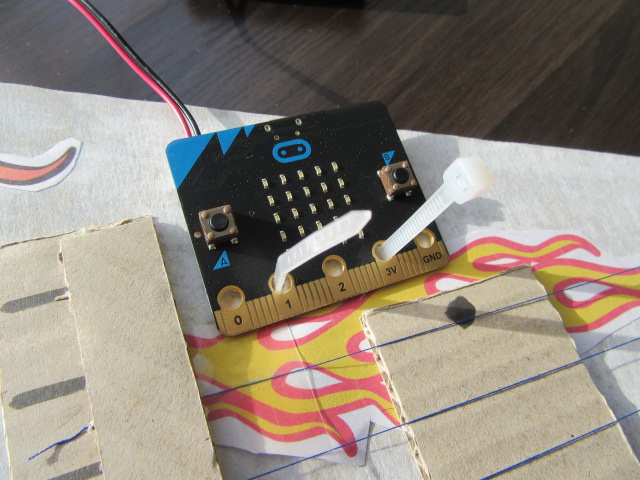
micro:bitのワニ口クリップを挟む場所
micro:bitの下側金属部分には、0、1、2、3V、GNDとあります。
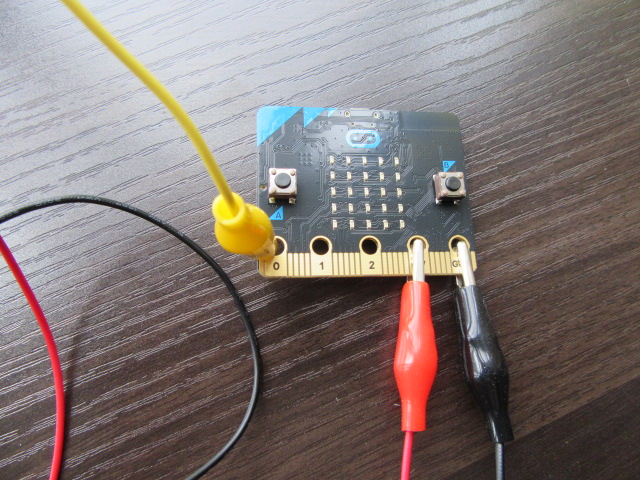
3Vに赤線、プラス。
GNDに黒線(今回サーボは茶色)マイナス。
残りの信号線を、0か1、2のプログラム時に指定する番号につなぎます。
今回は0です。
ワニ口クリップで挟んじゃいます。
あとは電池ボックスを上部に指せば、micro:bitが起動しますが、まだプログラムを転送していません。今回はプログラム転送時にパソコンにつないで動かすのでつけてませんが、パソコンから取り外して使うときには電池ボックスをつけてください。
コード
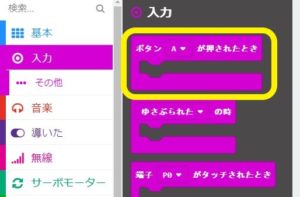
プログラム作成ページの新しいプログラムをひらきます。
最初にボタンで操作するので、入力タブでボタン操作を選択します。
普通のサーボなら
高度なブロックの入出力端子からサーボに関する項目を選べます。

360度回転サーボの場合は
高度なブロックの拡張機能をクリックします。
現れた画面でサーボを選んで機能をプラスします。

サーボのタブが新たにできるので、ひらいてみると回転サーボの項目があります。

今回はシンプルにAで動いてBで停止するようにしてみました。
細かい制御はまた調べてみます。

見えにくいですが、出力をP0としています。
ワニ口クリップを信号線のつないだところに合わせてありますよ。
※ 360度回転サーボに関しての訂正
※ どうもよく調べたら、回転サーボも入出力端子のタブから制御できるみたいです。
角度の数値をですね、90を起点に、0~180にすることで回転方向とスピードが調整できるそうです!

このような感じでコードを書くとよいようです。
動かしてみました
そうそう、回転サーボはPCのプレビューでは機能しませんでした。

回転サーボの設定がないみたいです。
実際にはちゃんと動きました。映像はこちらです。

コメント