今回はmicro:bitで距離センサーを実験しました。
いずれはロボに搭載して、勝手によける的なことをと考えています。
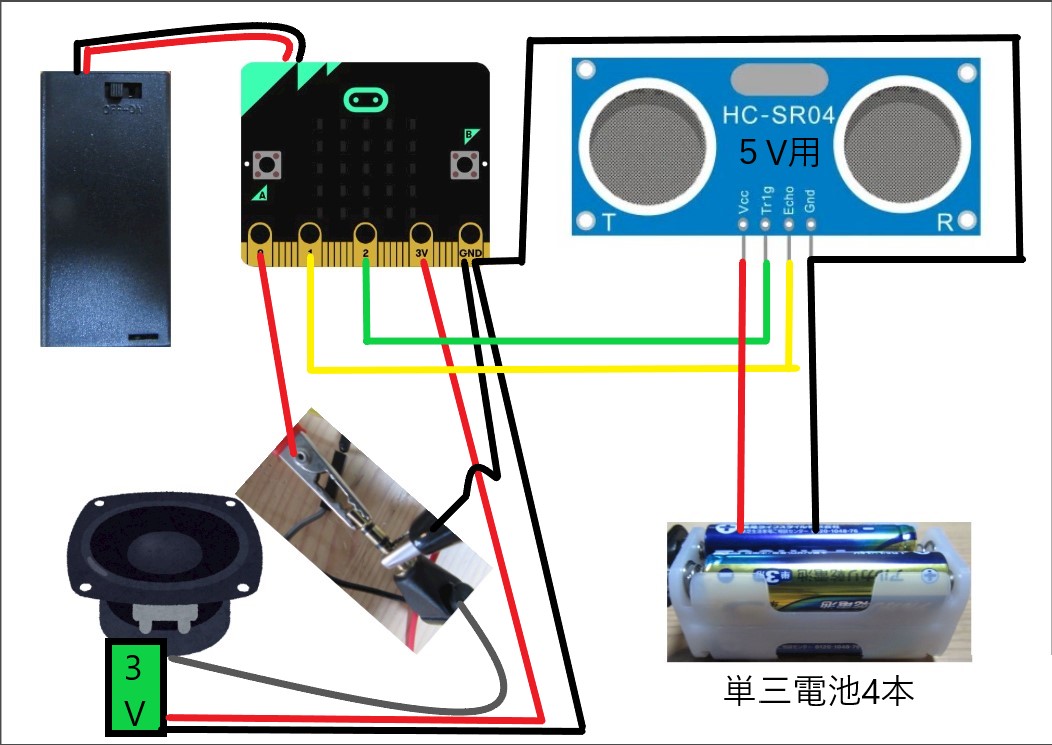
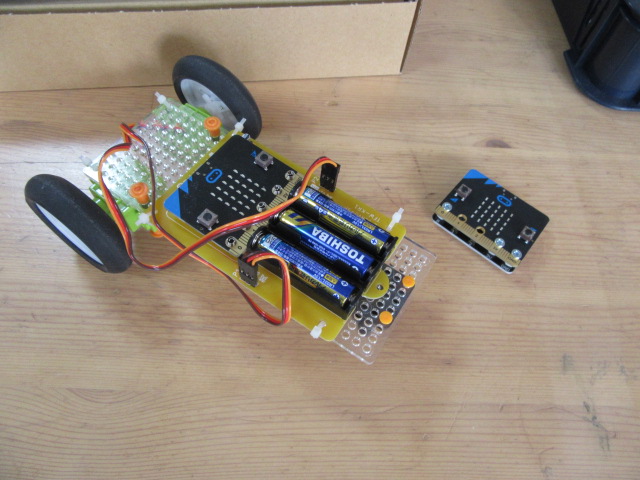
まずは組み立て
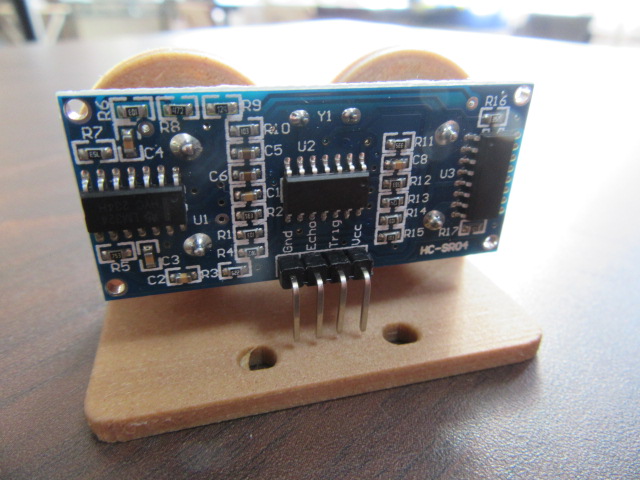
使用したセンサーは、HC-SR04です。
確か中国製のやつだったと思います。

こちらは、超音波を対象にぶつけて、帰ってくる反射時間で距離を判断します。
今回はHC-SR04が5V で動作するのに対して、micro:bitが3Vなので、少しややこしくなりました。
なんか、3V対応のセンサーもあるとのことなので、調べてみようとは思っています。
スピーカーはジャンク!

なんじゃこれ?です。
ピンジャック方式で、電池で動いていたものです。
3Vは覚えていたので、micro:bitから電源を取ります。
写真で見るとぐちゃぐちゃです・・・。
ブレッドボードもごちゃごちゃ・・・。
ですので、図解しました!
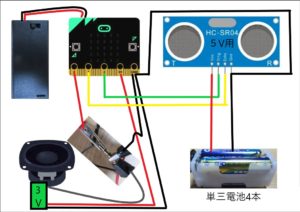
参考にしてくだされば幸いです。
コードです。
今回コードを作るにあたり、参考にしたブログがあります。
後は少しだけアレンジしています。
迷いどころは、「変数」に「距離」を追加するところと、

拡張機能で、sonarを追加するところだと思います。


まず最初の画面

残りはこのような感じです。
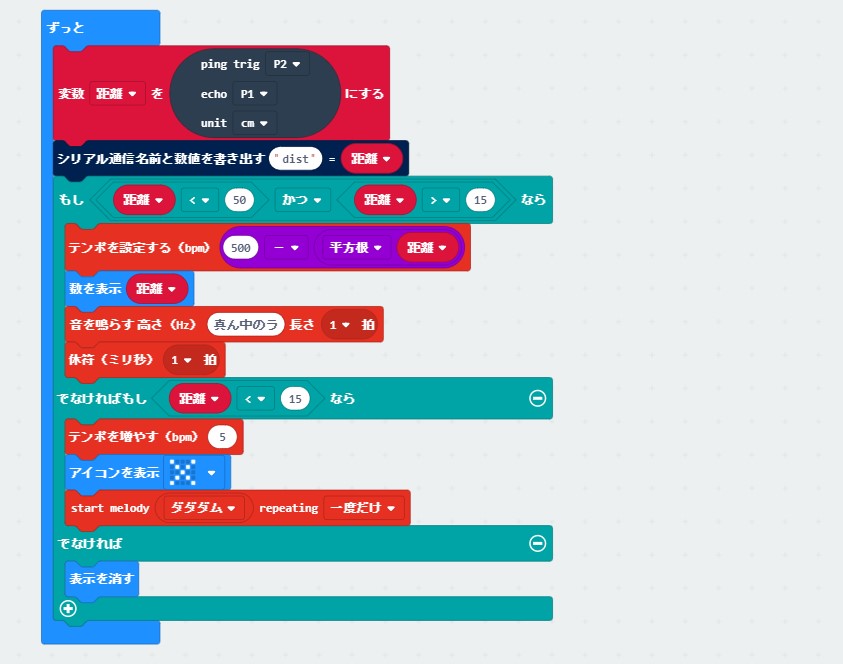
pige trigをP2
echoをP1
単位はcm
distとか平方根とかありますが、まずやってみてでいいと思いますよ!
実は私もそんなもんです!
私使用の部分
15cmいないでうるさく音が鳴るところが私のアレンジです。
ところで、コードって共有できるんですね!
知りませんでした・・・。
私は我流でいい加減なのを前提に、貼っておきます。
コメント