関連記事
いよいよ起動
急ぎ配線束ねてしまおう
急ぎ配線を束ねようかと思いましたが、なんか変。
手を左右間違えてつけていました・・・。
今までも結構間違えがありました。
なかなか難しいものですね。
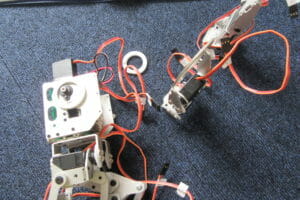
気をとりなおして続けます。
これはコントローラーの受信機だろうか?

取り付けはこんな感じでいいのかな?
試行錯誤でやってみます。

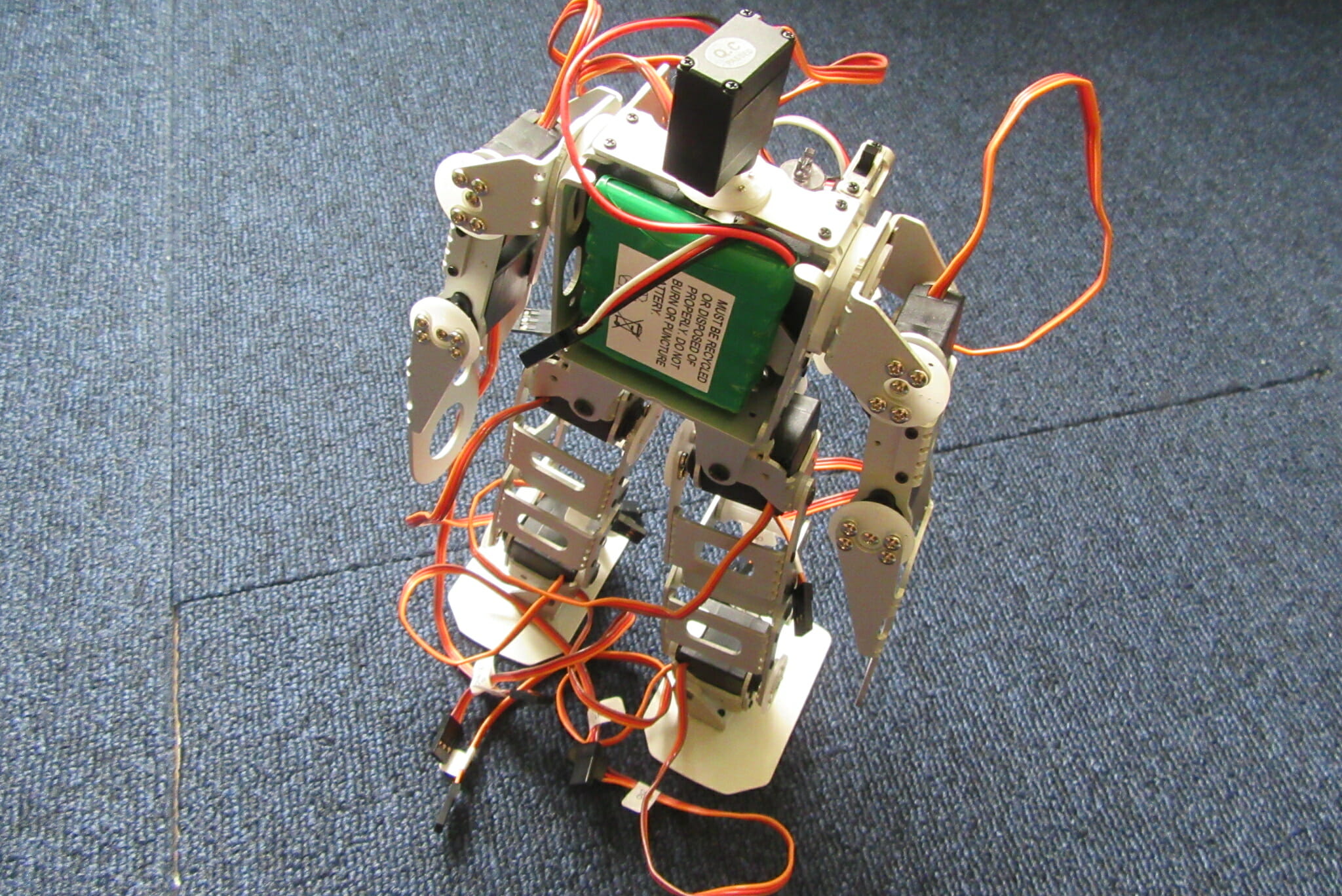
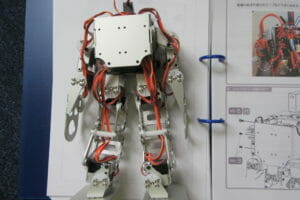
一応完成したが・・・
我ながらミスが多いので不安しかない・・・。
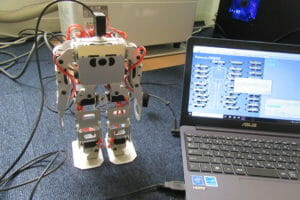
パソコンにつないでみました
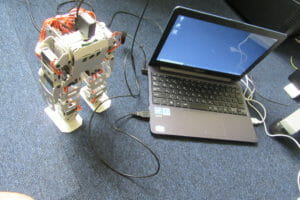
初期位置の微調整です。
付属の道具を使って角度を合わせます。
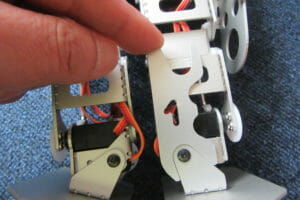
納得がいく感じに調整出来たら、
あとはcpuボードに調整結果を書き込むだけです。
これもソフトウエアがナビゲートしてくれるので安心。
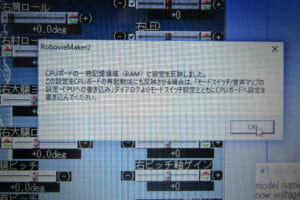
これに関しては、初体験ですがそれほど迷いませんでした。
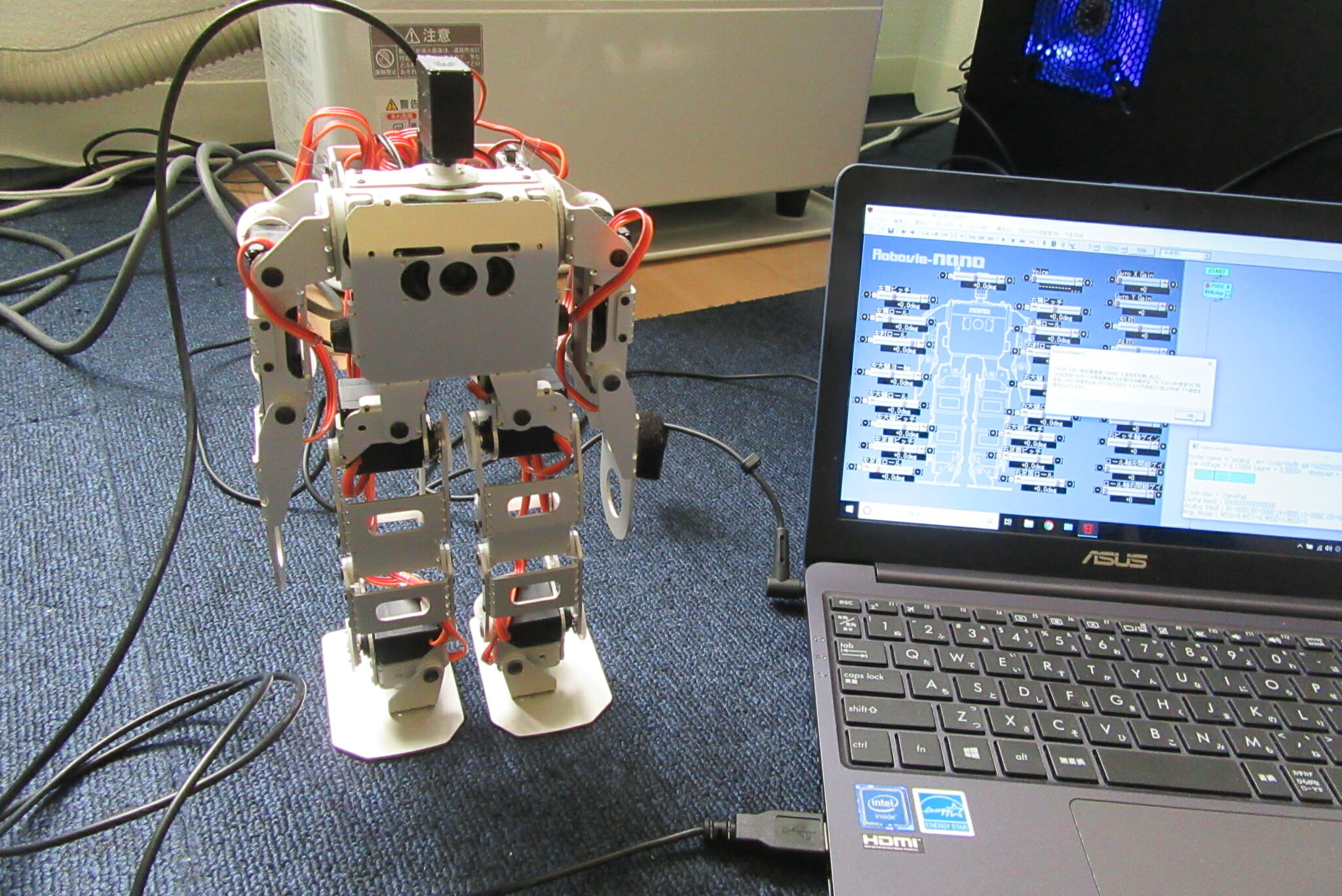
では、データの書き込みを行います

起動
やった\(^_^)/念願の初めての2足歩行ロボ成功です。
うれしくって動画を撮りました!
でも世の中にはもっとすごいロボ好きもいるので、
少しでも追いつけるように
ちょいちょい色々挑戦したいです。
コメント