
フォロ購入レビュー
フォロとは?
ELEKIT社で発売している6本足で自走するロボットのプラモデルです。
赤外線センサーで障害物を検知する仕組みです。
走行モードは2種類あります。

- なかよしモード(追従する)
- たんけんモード(障害物をよける)
制作にあたっては、プログラミングなどは一切なく、小学生高学年なら独りでも製作可能だと思われます。
もっと小さいお子さんでも家族でわいわいやりながら制作すれば十分楽しめると思います。
購入動機
私は常日頃からロボが好きなんです。
自分でもシングルボードコンピューターのRaspberry Piで自走ロボを作ったりしています。
ただ私の作れるものはタイヤで走行する車タイプのものですので、6本足ですが、歩行タイプのロボにとても興味がありました。
自走するタイプの歩行ロボだと高価なものが多い印象ですが、こちらはネットで4000円くらいで購入できるとリーズナブルなのも気に入りました。
組み立ててみた
商品の箱はA4より少し大きいくらいです。

説明書は33ページもあり、作り甲斐がある感じです。

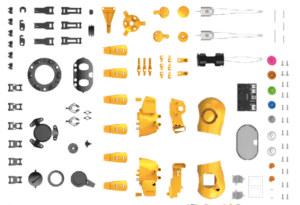
あわてて作ってしまったので部品の写真を撮り忘れました・・・。
メーカーサイトから写真をお借りすると、こんな感じです。
必要な道具
組み立ては接着剤いらずでわずらわしくありません。
ねじをしめるのでドライバーが必要です。
部品の切り取りにニッパー、カッターが必要です。

やすりもあればなおいいです。
私の場合カッターはペンタイプを愛用しています。細かいところが切りやすくよいです。

組み立ててはまりそうなところ
まず全体的に部品を切り離すときはキレイに切り離しましょう!
面倒でも、手で引きちぎらずにニッパーや爪切り(切れ味悪くなるのでいらないもので)で切りましょう。
では私がはまりそうだったところです。
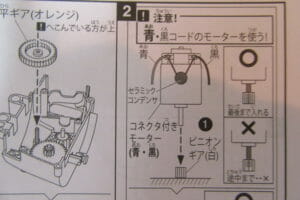
1、モーターが2個あります。
最初の工程でモーターの配線の色を確認してください。
反対につけるとばらさなくてはいけなくなります。
2、顔をはめ込むところ
少してこずりました。
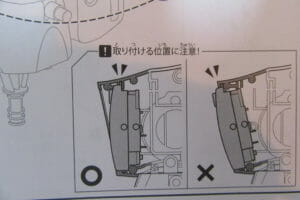
3、似た部品が多いので
落ち着いて説明を読みましょう。

特に足の部分は複雑な構造です。

慎重に組み立てましょう。
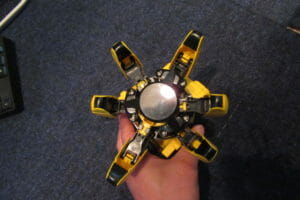
組み立ては私で1時間くらいでした。
とりあえず遊んでみた
なかよしもーど
私の手を追いかけてフォロが動きます。方向転換の時に、足で回転するのではなく、上半身をグリンと回転させるのが特徴ですね。
たんけんモード
自分で壁を検知して方向転換します。
半透明のプラケースだと赤外線がうまく機能しませんでした。
シーツをかぶせての実験です。
最後に
お、おもしろい・・・。
これを手本に将来Arduinoなどのマイコンボードで自分で設計できるようになったらすごいですよね!
コメント