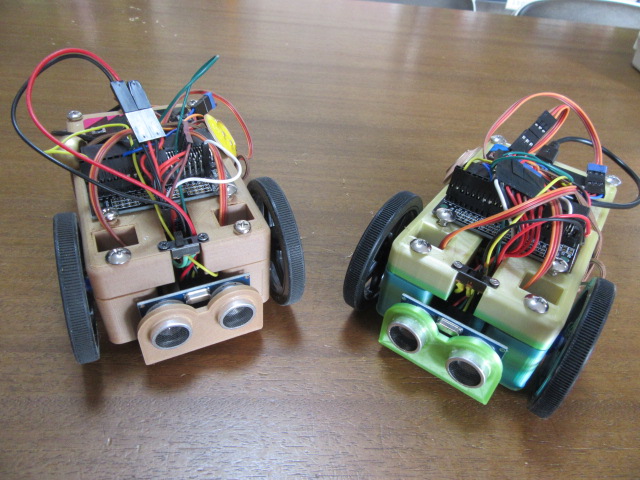
こけるということで、公開を見送っていたkoorogiですが、ついに公開します。
構成部品
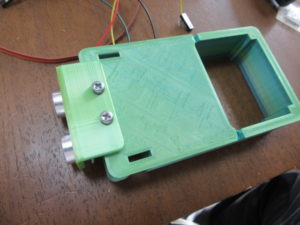
ボディ
もうしょっぱなからデーター出しちゃいます。
まず今回は3点の部品構成。

センサー取り付けパーツ

koorogi蓋
koorogi底
ですね。
その他部品

このような感じです。
- 360度回転サーボとタイヤのセット。Feetech FS90R
- 超音波距離センサーHC-SR04
- マイクロビット
- エッジコネクター変換基盤
- 単3電池ボックス4本
- 自在キャスター
- 配線類など
組み立て
距離センサー、底、蓋の順です
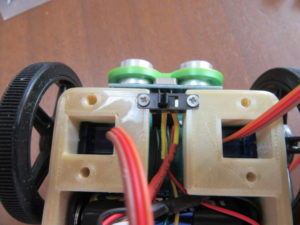
距離センサーをセンサー台につけます。
きつかった・・・・。プリンタの調子によります。

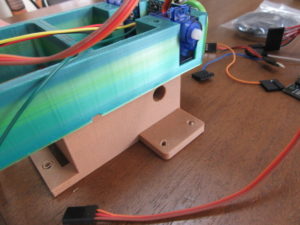
ボディ底を裏返して、センサーを固定
ネジはM4の12ミリ、タッピングビスです。

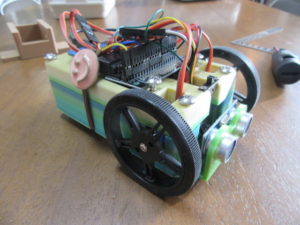
ボディ底を表に戻して、サーボを差し込みます。
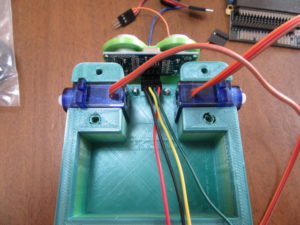
何かの台に乗せてタイヤまでつけてしまうとよいでしょう。
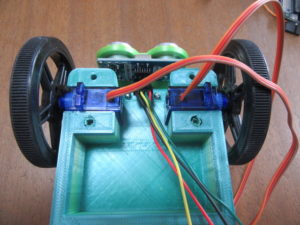
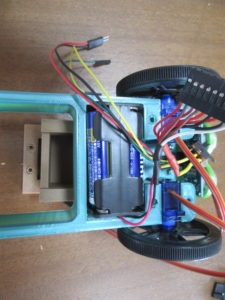
電池ボックスものせます。
次は蓋の部品です。
後ろタイヤのキャスターは蓋を裏返して取り付けます。


私は、コーエイのG-25というサイズを使用しました。
素材は、ゴムとか、ポリカボとか色々あるので、試してみるといいでしょう。
M4の8ミリのタッピングビスで固定します。

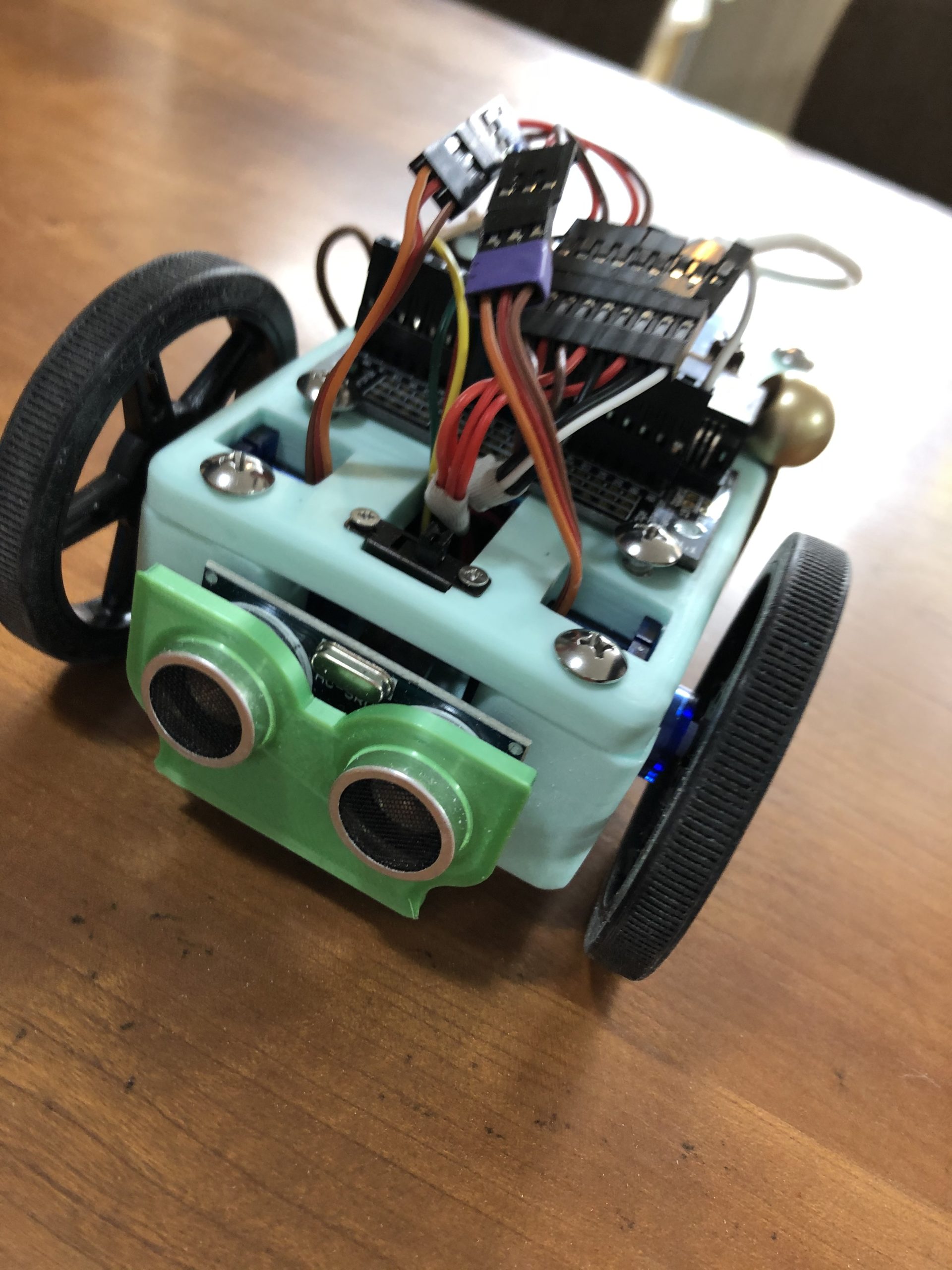
取り付けたら、配線を出しながら蓋をかぶせてしまいます。
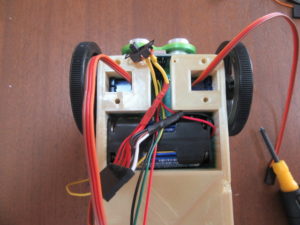
スイッチを取り付けます。

2×6のタッピングビスで固定
ボディを固定するのは、M4で20ミリのタッピングビスです。
6か所固定。

真ん中のビスは少し浮かせて、micro:bitを挟みます。

配線について
配線についてはこのようなものを作ると楽ですよ!
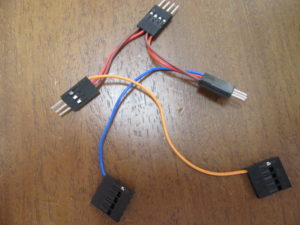
これはサーボ用です。
電源に一括でつないだりできますよ。
micro:bitにつなぐGNDもお忘れなく。
私はマイナスを一つ白い線で作り目印にしています。
サーボも目印をつけておくと、左右がわかりやすいでしょう。
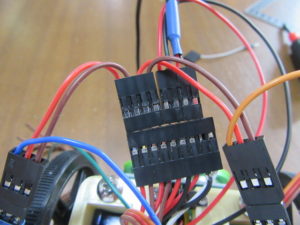
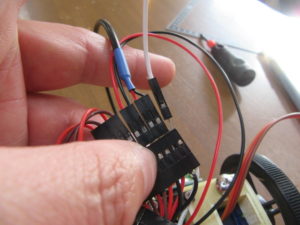
micro:bitにも配線します。

私は大きなソケットをわざと使い、端からはめると位置を間違えないようにしています。
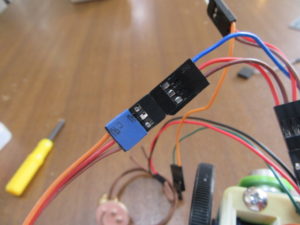
マイクロUSBの電源です。
後はボディーに溝が切ってあるので、かわいいヘアゴムで配線をまとめて出来上がりです。


プログラム
一応ですけど参考までに載せときます。

コメント